扫地机器人传感器在哪个位置_扫地机器人传感器介绍
- 2020-09-09 10:07:14
- 4818
看到家里的扫地机器人在运转脑子里不禁想到了很多关于扫地机器人的问题,其中有一个问题就是扫地机器人它究竟是怎么寻找路线的,是怎么发现前面有障碍物然后实行躲避的。小编经过多方面的搜查资料终于是找到了正确的解答方法,我们一起来看看吧。
1.扫地机器人的传感器在哪里
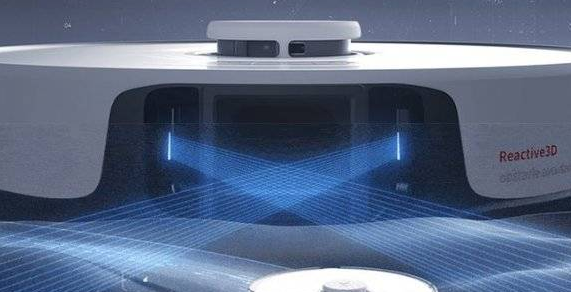
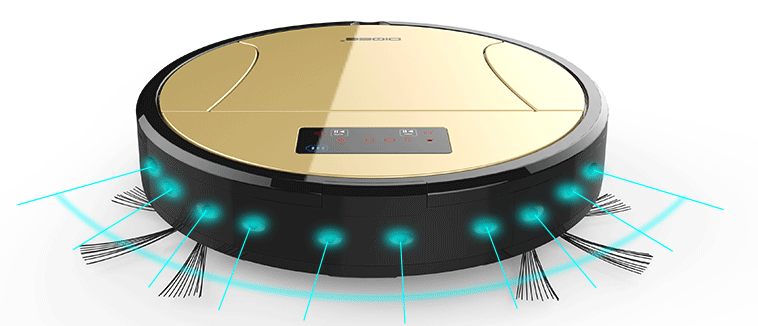
扫地机器人的传感器一般都在扫地机器人的前方,像小米扫地机器人小瓦扫地机器人的就是在顶上那个凸起的圆顶那你,像海尔科沃兹这类的扫地机器人的传感器就是在它的前方。

2.扫地机器人传感器的详细介绍
超声波传感器
超声波是一种一定频率范围的声波它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象利用这一特性,就可以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用其具体的计算公式如下:
s=v×t/2
注:s:为障碍物与吸尘器之间的距离;
t:为发射到接收经历的时间;
v:为声波在空气中传播的速度
在扫地机器人中,避障功能的实现正是利用了这一超声波测距的原理它的传感器部分由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成

由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号在控制器送来的路选信号的作用下,40kHz的振荡信号被加在超声发射探头的两端,从而产生超声信号向外发射;该信号遇到障碍物时,产生反射波,当这一反射波被接收器接收后,根据前述测距的原理,就可以精确地判断障碍物的远近;同时,根据信号的幅值大小,也可以初步确定障碍物的大小。
超声波传感器采用直接反射式的检测模式。位于传感器前面的被检测物通过将发射的声波部分地发射回传感器的接收器,从而使传感器检测到被测物,经单片机系统处理判断前方物体的大小、远近及大体属性。

红外测距传感器
红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,即可利用红外线的返回信号来识别周围环境的变化。值得一提的是现在卖的最好的小米扫地机器人和石头扫地机器人就是使用这种传感器。需要了解小米和石头扫地机器人的同学可以查看小米扫地机器人旗舰店和石头扫地机器人旗舰店
接触式传感器
接触式厚度传感器,通常采用电感式位移传感器、电容式位移传感器、电位器式位移传感器、霍耳式位移传感器等(见位移传感器)进行接触式厚度测量。为了连续测量移动着的物体的厚度,常在位移传感器的可动端头上安装滚动触头,以减少磨损。接触式厚度传感器可测量物体高度,空间大小。全能清洁机器人可利用这一点探测障碍物的高度,进一步做出判断发挥它的功能.

红外光电传感器
把浑浊度传感器的外壳固定在被测箱体内,采用一定波长的红外发光二极管作为检测光源,穿透被测溶液,检测其透射光强来检测溶液浑浊度的程度。红外发光二极管发射的红外光穿透被测溶液的介质,被接收端的光电三极管接受,产生光电流。由于溶液含有的介质、灰尘的颗粒大小、密度不同,光电三极管的光电流近似为线性变化。经滤波后输出,即得到与浑浊度相关的检测信号。
防碰撞传感器
因各种因素的影响,扫地机器人难免会有撞上障碍物的可能。为了处理这种情况,我们利用光电开关传感器来感应车体受到的碰撞,及碰撞的大概位置,以使扫地机器人做出相应的决策。
在扫地机器人的前端设计了约180°的碰撞板,在碰撞板左右两侧各装有一个光电开关。光电开关由一对红外发射对管组成,发光二极管发射的红外光线通过扫地机器人机身特制的小孔被光敏二极管接受,当机身碰撞板受到碰撞时,碰撞板就会挡住机身特制小孔,阻碍红外线的接受从而向控制系统传达信息。光电开关工作原理如图所示。此结构可避免测量盲区带来的误差。扫地机器人在任何方向上的碰撞,都会引起左右光电开关的响应,从而根据碰撞的方向做出相应的反应。
防跌落传感器
为了防止扫地机器人遇到台阶时跌落,在扫地机器人背面安装3个防跌落传感器。防跌落传感器安装位置如图所示。

防跌落传感器也是利用超声波进行测距。当扫地机器人行进至台阶边缘时,防跌落传感器利用超声波测得扫地机器人与地面之间的距离,当超过限定值时,向控制器发送信号,控制器控制扫地机器人进行转向,改变扫地机器人前进方向,从而实现防止跌落的目的。扫地机器人防止跌落示意图如图所示。
防过热传感器
为了防止扫地机器人持续工作导致电机过热,从而导致电路的烧毁,在扫地机器人电路板上安装两个温度传感器。当扫地机器人工作一段时间电机温度达到一定限度后一个温度传感器发送信号给控制器,控制器再控制扫地机器人停止工作,并运行散热风扇进行散热。当温度降到一定程度后,另一个温度传感器发送信号给控制器,控制器在控制扫地机器人继续工作。
床底深度清扫
床底、沙发底、柜子底等地方相对较脏,因此这些地方需要重点清扫,以保证清洁度。为实现此功能,在扫地机器人正面安装8个光敏传感器。
扫地机器人在床底或柜子底开始工作后,光敏传感器接收的光强较弱。当扫地机器人运行离开床底或柜子底时,光敏传感器接收到的光强发生变化,向控制器发送信号,控制器发出控制信号,使扫地机器人转向,重新回到暗处,继续进行清扫。
灰尘盒防满传感器
为了检查扫地机器人灰尘盒中的灰尘是否装满,在灰尘盒两侧安装变介质型电容传感器。当灰尘盒中灰尘高度到达电容传感器高度时,电容传感器中的介质发生改变,由于灰尘的介电常数与空气的介电常数不同,从而引起传感器电容变化,传感器将信号传给控制器,控制器控制扫地机器人发出报警信号,提醒主人应该清理灰尘盒了。

3.扫地机器人使用中的注意事项
不要在潮湿的环境使用,以免电机受潮发生短路起火。如果不是干湿两用的扫地机器人千万不要吸水。
不要把火柴、烟头等易燃物品吸入扫地机器人。
使用时间不宜过长,如果机身过热,应该停止一点时间再使用。防止电机过热而烧毁。
严禁在易燃易爆的危险场合使用扫地机器人,以免引起火灾爆炸事故。
扫地机器人每次工作完毕会自动回到充电座充电,等待下次定时预约清扫时启动自动清扫。如果长期不使用扫地机器人时,要将电源线从插座上拔下,将扫地机器人电池取出并整理好,收藏在干燥的地方。